川崎重工グループは4月3日、人が乗れる4足歩行のロボットのコンセプトモデル「CORLEO(コルレオ)」を発表した。
水素を動力源とし、操作は乗馬のようにライダーの重心移動によって行う。4月13日に開幕する2025年日本国際博覧会(以下、「大阪・関西万博」)にて展示予定。
今回発表されたCORLEOは、川崎重工グループが「大阪・関西万博」の未来社会ショーケース事業「フューチャーライフ万博・未来の都市」にて、2050年のコンセプトモデルとして披露するものだ。


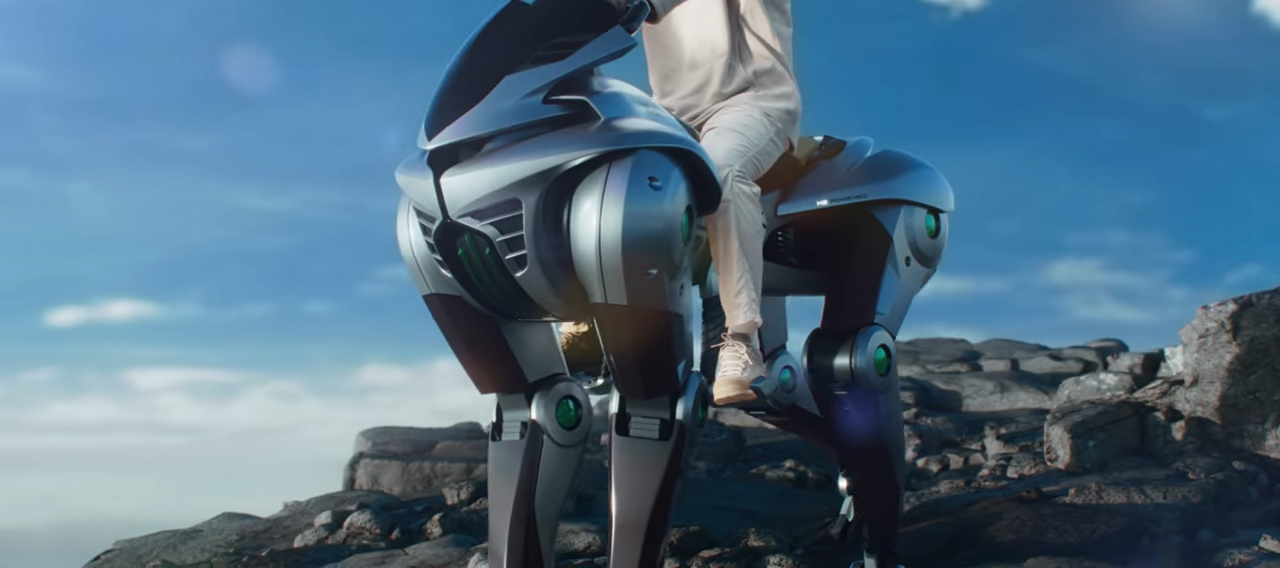
本マシンは、ロボティクスがもたらす4脚の悪路走行性能に加え、川崎重工がモーターサイクルの分野で培ってきた操縦性と安定性をあわせ持つ。乗馬のようにコントロール可能で、山岳や水場などのタイヤでの走行が難しい地形を、初心者でも安全・安心に走破できるという。

マシン前部に搭載されたパネルには、水素残量、山頂までのルート、重心位置などを表示するナビゲーションシステムを表示。夜間は路面に進路を示すマーカーを照射することで、ライダーのより最適なライディングをサポートする。

また、サステナブルモビリティでもある本マシンは、150ccの発電用水素エンジンを搭載。後方に搭載するキャニスターから水素を供給、発電された電気を利用し、4脚に搭載したパワーユニットで駆動する。




(画像はYouTube「Kawasakiが提案する未来のパーソナルモビリティ「CORLEO」」より)
川崎重工グループは大阪・関西万博への出展にあたり、「移動することによって幸せを感じる」という「移動本能」という展示テーマを発表。本マシンCORLEOはそのテーマを満たすもので、山々を駆けのぼり、澄んだ空気を味わい、目を見張る景色を楽しむなど壮大な自然をフィールドに、ひとの移動本能を解き放ちたいという想いを込めているという。
なお、大阪・関西万博の夢洲会場では、CORLEOが複数のポーズを取る様子などが披露されるほか、未来の公共交通システム「ALICE SYSTEM」に関する展示も行われるとのこと。詳細については、大阪・関西万博特設サイトを確認してほしい。